点云
点云导入主要是把激光雷达、倾斜摄影测量等技术生成的点云数据成果导入到三维地球上。主要用于三维点云数据预览,由于每一个点云都具备空间坐标信息,还可以通过点云数据进行测量分析。如加载电力杆塔点云数据,通过高度测量测量出每一个电力塔的高度。
对于las格式点云数据,点云大师功能还能通过点云数据提取地面点、生成tif地形、提取等高线、提取点云边界以及将提取的数据导出为dxf格式成果。
在逆向工程中通过测量仪器得到的产品外观表面的点数据集合也称之为点云,通常使用三维坐标测量机所得到的点数量比较少,点与点的间距也比较大,叫稀疏点云;而使用三维激光扫描仪或照相式扫描仪得到的点云,点数量比较大并且比较密集,叫密集点云。
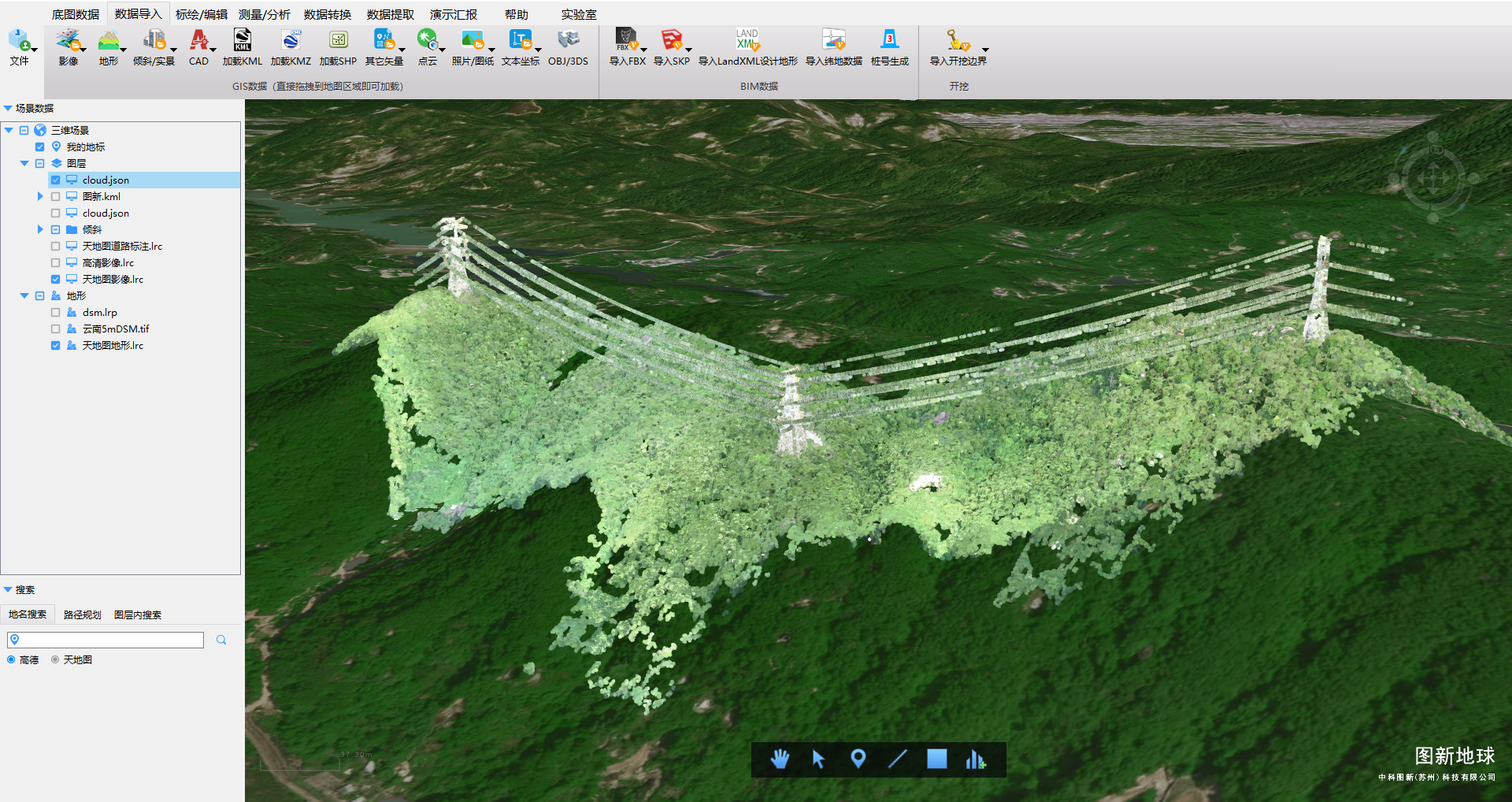
加载3dtiles格式点云(大疆智图成果)
由于点云数据的量非常大,在显示海量数据的时候就非常的吃力,因此需要用到3DTiles。3D Tiles=lod+gltf,专门为大量数据流式传输和海量渲染而设计的一种格式。tile以树的结构来组织,其结合了层次LOD(HLOD)的概念,以便最快最佳的渲染空间数据,在树结构中,每个tile都有一个边界包围盒属性,该边界包围盒在空间中能够完全包围该tile和子节点的数据。
图新地球支持导入大疆L1激光点云数据成果,在大疆智图工程文件目录里的 terra_pnts目录下,直接选择tleset.json文件即可。
操作步骤:
- 数据导入 -- 点云 -- 加载3dtiles格式点云
- 点击【浏览】,选择需要导入的json格式文件。
- 选择后,即可加载到场景中。
导入Las格式点云数据
点云数据一般为.las格式。LAS 文件是激光雷达点云点的集合,每个点都有水平坐标(X 和 Y)和垂直高程 (Z) 值。除了高程值之外,LAS 文件还提供了一种通用格式来存储附加信息,例如激光强度、扫描角度、返回信息等。其中一些附加信息(例如强度)对于可视化非常有用。而激光点云的精度,对于地形测绘的准确性起到了很大的助力。例如:采用激光点云数据制作大比例尺地形图(如1:500)。
操作步骤:
- 数据导入 -- 点云 -- 导入Las格式点云数据
- 选择las点云数据,自动将生成的图层文件保存在同路径下(可修改)。
- 加载完成后,点击【预览】即可。
点云赋色
激光雷达(LiDAR)点云数据具备高精度的坐标信息,但缺乏颜色信息,难以用真实的色彩对现实世界进行直观展示。点云赋色的目的是给点云着色,增加颜色属性信息,提供更好的可视化效果,便于地物识别与应用,是点云数据处理基本且重要的功能。
当前图新地球支持真彩色、强度色、高程彩色、回波次数色四个模式,右键点云数据图层可以选择赋色模式。
真彩色
大多数激光雷达软件都具有合并激光雷达和图像的能力。相机拍摄的影像数据包含丰富的颜色信息,通过点云与影像的匹配,可以将影像中的颜色信息附加在点云中,使点云在渲染时更加真实。
强度色
强度是从激光脉冲返回传感器的能量。有很多因素会影响返回的能量量(例如表面粗糙度、大气影响、近红外能量吸收等),但激光雷达强度可以从激光雷达的确切时间创建一个不错的黑白“伪图像”获得。使用强度值时,要注意强度通常未经校准,因此该数据仅适用于定性视觉分析。
高程彩色
高程彩色是通过数据集中每个点的垂直高程 (Z) 值进行分层设色。包括高程最大值与最小值,计算高程中间值;然后选取渲染的颜色值,比如红、绿、蓝三种颜色。最后,自上而下,应该为红绿蓝三种颜色渐变的过程,即点云坐标最小处设置为蓝色,中间值设置为绿色,最大值设置为红色。
回波次数模式
对于多脉冲式机载LiDAR系统而言,系统记录的回波信息包括单次回波(singular return)和多次回波(multiple returns),二者的区别在于对同一束激光脉冲是否发生多次反射。即:当激光扫描仪发射的激光脉冲接触到被测目标时,部分脉冲能量的反射信号会被系统接收并记录,而剩余的脉冲能量继续传播,当遇到另一目标或原被测目标的另一部分时再次发生反射,直至能量消耗殆尽。如此发生的多次反射使得机载激光扫描系统接收到多个反射信号即多次回波信息,通过回波次数展示点云颜色。