Smart3D(ContextCapture)操作手册中文翻译1-软件简介与数据介绍
1开始(Getting Started)
1.1欢迎(Welocome)


欢迎阅读ContextCapture实景建模大师用户手册。ContextCapture实景建模大师是一套允许从简单的照片中生成高分辨率的3D模型,而无需任何人工干预的一种软件解决方案。ContextCapture通过先进的摄影测量、计算机视觉和计算几何算法解决了这些问题,这些算法在精度、可扩展性、效率、使用、健壮性和互操作性方面满足了工业质量的要求。
ContextCapture由Bentley Systems公司开发,Bentley Systems公司是致力于为基础设施提供全面的软件解决方案的一家领先公司。
ContextCapture是Bentley Systems公司的注册商标。保留所有权利。
1.1.1更新(What's New? )
- 基于兴趣区域的裁剪
- 使用python wheel的新MasterKernel SDK包
- 新的Block类型“Orbit”,优化薄体结构(蜂窝塔、塔架、风力涡轮机等)等的数据处理
- 改进的质量报告/采集报告(侧视图、输入位置距离、不确定椭圆、颜色标记、可展开部分…)
- 新的Reconstruction设置:纹理源优先级
- 新的Production 设置:纹理锐化(通过应用锐化过滤器(默认情况下启用)增强网格纹理,此选项可以禁用以保持初始图像清晰度)
- Surveys:新的控制点的导入向导,增加了对Propeller格式的支持。
- 裁剪区域可以选择DGN格式
- 新的web应用:ContextCapture Web
1.1.2安装(Installation )
ContextCapture不需要管理员权限,但是您必须具有管理员权限才能安装应用程序。要确保您拥有最新版本,请访问www.bentley.com并登录以获取安装程序。如果您以前没有这样做,您将需要在网站上注册。一旦下载了最新的安装程序,只需双击下载的包并按照说明安装。
注1:对于集群用户:请确保所有PC安装相同版本的ContextCapture版本,以避免冲突。
注2:安装新版本可能会存在兼容性。如果有任务未处理完成,安装新的版本可能出现处理失败。您只需从ContextCapture Master重新提交即可解决。
1.1.3配置(Configuration)
Job队列
ContextCapture主从引擎使用基于作业的工作模式,ContextCapture允许设置计算机上的作业队列目录。当ContextCapture Engine启动,它读取此设置并专用于相应的作业队列目录。当ContextCapture Master启动时,它读取此设置并将相应的作业队列目录分配给新项目。请注意现有项目的作业队列目录不受ContextCapture设置的影响。相反,它可以从ContextCapture Master中的“项目选项”(第35页)选项卡进行修改。
互联网接入
ContextCapture需要Internet访问才能激活您的许可证和帐户、管理软件更新,以便访问Bentley地理协调服务,或直接在网上发布3D模型。您可以根据代理设置配置连接。
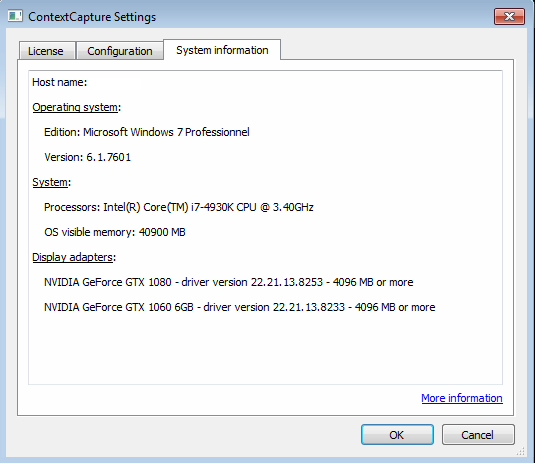
1.1.4系统信息(System information)
从ContextCapture Setting中,可以从系统信息选项卡获取系统信息摘要。如果软件出现技术问题,技术支持团队可能会要求您提供有关你的系统信息。使用此工具获取系统报告并将其发送给技术支持团队。

1.1.5许可(Licensing)
ContextCapture许可基于Bentley SelectServer。
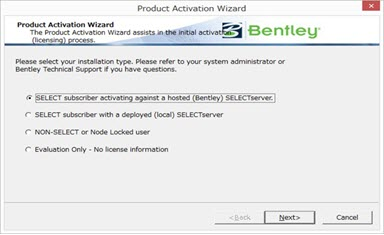
SelectServer使组织能够最大限度地利用许可证,确保不间断访问Bentley软件,了解许可证使用情况,并将管理负担降至最低。用于逐步完成产品激活过程。安装产品后,必须获得许可证和激活该许可证。
打开许可证管理工具以管理您的许可证(开始菜单>程序>Bentley>ContextCapture 64-bit> License Management Tool)。从许可证管理工具对话框中,打开Tools > Product Activation Wizard。

1.1.6几个有用的概念(Useful concepts)
要想深入使用ContextCapture需要了解摄影测量学和大地测量学的一些概念。
相机的内方位元素(interior orientation)或内部参数(intrinsic parameters)指的是相机的一些内部属性,例如:相机传感器的尺寸、镜头焦距、像平面主点的位置与镜头畸变等。
影像组(photogroup)由一组具有相同内方位元素的影像组成。所以,影像组属性(photogroup properties)是指其包含该影像组内所有影像统一的内方位元素。
注:实际应用中,每一台相机的内方位元素是唯一且固定的。即使是同样型号和配置的两台相机,它们各自拍摄的影像也不可以合并至同一个图像组(photogroup)。
相机的外方位元素(exterior orientation)或姿态(pose)指的是相机光学中心的三维坐标位置以及相对全球坐标系下的三维旋转角参数。
为了执行三维重建任务,ContextCapture必须使用每组影像组的非常精确的相机属性和姿态参数。如果原始数据没有这些属性,或者输入的数据不够精确,ContextCapture 将会利用空中三角测量(aerotriangulation 简称AT或空三)的处理过程自动计算出这些属性和参数。
空中三角测量最重要的一步是确定两个或多个不同照片中的像素对应于场景中同一物理位置的投影:
· 如果事先不知道该物理点的三维位置,图像的相同之处会产生一个同名点(tie point)。ContextCapture能够自动运算生成大量的同名点。
· 如果预先输入某物理点的三维位置,对应影像上的相应位置和空间三维位置将构成一个控制点。如果有了控制点,空中三角测量的结果便带有了准确的空间地理属性。在ContextCapture中,同名点是完全自动生成的,而控制点则需要人工干预,由人工输入空间三维坐标和在影像上的准确投影。
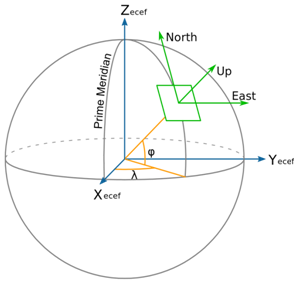
当影像的位置及姿态带有了空间地理属性,ContextCapture使用Earth Centered Earth Fixed (ECEF)坐标系(也被称为地心坐标系)。ECEF是一个标准的全球笛卡尔坐标系。请参考http://en.wikipedia.org/wiki/ECEF获得它的完整定义。
ContextCapture在使用ECEF作为输入影像的空间坐标系的同时,在进行三维重建项目时,使用ENU(East North Up)。(ENU)是以本地原点为中心的笛卡尔坐标系,使用WGS84椭球,三个坐标轴指向东(X),北(Y),天(Z)。由于它的Z轴与向上方向矢量重合,东北天坐标系比ECEF对3D模型操作更为便利。当然,ContextCapture生产的3D模型是可以重新投影到任何地理坐标系的。

ContextCapture也可以使用经纬度(lon,lat)或投影(X,Y)坐标来描述地理位置,同时配以椭球高程,即相对于参考椭球体的高差值(通常使用WGS84椭球体,但如由特殊坐标系需要,也可使用别的椭球,比如GRS80)。椭球高程不同海拔高程,后者基于当地平均海平面高度。ContextCapture使用椭球高程代替海拔高程,因为前者有一个简单并且无歧义的数学定义,而后者基于地理高度网格而受采样量和采样精度的影响。
2.影像数据准备(Preparing the Imagery Dataset )
2.1影像采集(Photo acquisition)
重叠度(Overlap)
模型重建对象的每一部分应至少3个不同的视点(但比较接近)进行拍摄。一般来说,连续影像之间 的重叠部分应该超过60%。物体的同一部分的不同拍摄点间的分隔应该小于15度。
对于简单的物体,您可以环绕式地从物体周围均匀分隔地采集至少大约30-50张影像。
对于航空摄影,我们建议采集航向重叠不小于80%,旁向重叠不小于50%的影像。为实现更好的效果, 更好地还原建筑物外立面、狭窄的街道和各种庭院,建议同时采集垂直和倾斜影像。虽然ContextCapture对非系统化乱序采集的图像具有非常强的适应性,但我们仍然建议事先准备合适的飞行计划以系统化获取影像而避免疏漏。
译者注:对于倾斜摄影,建议航向重叠85%,旁向重叠不小于75%
重叠度低,对于房子间的缝隙可能会出现连接的情况。
相机Camera models
ContextCapture支持广泛多样的影像采集设备,如手机、卡片数码相机、数码单反相机、摄 影测量专用相机及多角度摄相机系统。ContextCapture不仅可以处理静态影像,也可以处理从数字摄影机摄像动画中截取的视频帧。但是,ContextCapture不支持线性推扫式相机。
虽然ContextCapture对相机分辨率没有最小要求,但是高分辨率的相机可以以较少影像数量 以指定精度完成对物体影像采集,而且处理速度要快于低分辨率的相机。
ContextCapture需要知道相机感光体CCD(SensorSize)的宽度。如果您的摄相机型号并未在我们的自带数据库中列出,您需要将这些信息手动输入。如果您不确定您的摄相机的详细参数,请您从您摄相机 的 用 户 手 册 中 查 找 , 或 访 问 Digital Photography Review 等 相 机 参 数 网 站 查 询 : http://www.dpreview.com/products.
译者注:相机购买的时候都会有对应的参数,如果实在找不见,上面网站查找

影像精度(Projected Pixel Size)
影像精度指的是由传统航空摄影的地面分辨率扩展到更加广义(而不仅仅是航空图像)的获取图像 的分辨率设置。
生成三维模型的精度和分辨率与采集的影像精度直接相关。为达到预定的影像精度,您必须使用准 确的焦距及拍摄距离来采集影像。相关计算公式如下:
影像精度 × 焦距 × 图像的最大尺寸(长边) = 传感器宽度 × 拍摄距离[米/像素] [毫米] [像素] [毫米] [米]
由于ContextCapture能自动识别应用不同精度的影像来生产三维模型而无需固定统一精度的影像,因此整个项目可以允许不同影像精度、不同影像重叠度的组成的多重的数据源。然而,ContextCapture不能自动识别处理精度区别过大的影像。如果由于项目需要而必须采集精度跨度较大的影像,那么就需要补充采集一到数个级别的中间精度级别的影像以建立平滑过渡。
译者注:高低空结合指的就是这样的情况,常规来讲,建议高低空的分辨率差异不要超过4倍。超过4倍中间就插入一级。
焦距(Focal Length)
我们建议在整个图像获取过程采用固定的焦距。
如果需要获得非统一的影像精度,可以调整拍摄距离来实现。如果无法避免使用不同的焦距设置, 如由于拍摄距离的限制,应在每个焦距设置下各采集一定数量的影像组,避免某个焦距只有非常少量的影像的情况。
当使用可变焦距镜头,应需保持在一组影像上使用同一焦距,可以利用胶带将手动可变焦距镜头固 定住。 不要使用数码变焦,避免使用超广角镜头或鱼眼镜头,因为ContextCapture较难计算极端的镜头畸变。
译者注:实测表明,ContextCapture对多镜头、多焦距的支持很不错,一定要注意保持一个相机一个焦距的照片作为一个photogroup,一次拍摄过程中不要变焦
曝光(Exposure)
请尽量选用可避免重影、散焦与噪声、曝光过度或不足等的曝光设置,因为这些问题将会严重影响 三维建模质量。
手动曝光设置能有效降低3D模型贴图产生色差的可能性,所以如果摄影技术允许,同时有比较稳定和统一的光照条件时,推荐使用手动曝光。如果不具备条件,自动曝光获取的影像也能被处理。
译者注:建议阴天(无云彩飘动)拍摄,否则每个角度的镜头需要的曝光参数不完全一致。另外阴天没有影子。
注:我们推荐关闭光学或数码图像稳定功能(光学防抖)。
光照 (Lighting)
相对于直射光和(或)不断变化的光照,稳定的环境光源是更好的选择,因为前者增加了曝光过度和曝光不足的风险。室内拍照时,固定光源比试用闪光灯更好;室外拍摄时,阴天比大晴天更好。如果必须在晴天拍摄,最好选择中午左右使阴影区域最小化。
正确适当曝光下采集的阴影并不影响ContextCapture的模型生成质量,软件会在3D模型的贴图中还原阴影的正确位置。
译者注:如果真的是项目的特殊性导致曝光不均匀,ContextCapture有一个匀色功能。测试效果还不错。
影像后处理(Photo Retouching)
在把原始影像导入ContextCapture之前,请不要进行任何编辑,包括改变尺寸、裁剪、旋转、 降低噪音、锐化或调整亮度、对比度、饱和度或色调。某些相机有自动旋转影像的功能,请把它禁用。
ContextCapture不支持拼接的全景图作为原始数据,但是可以使用生成这些全景图的原始图像作为导入数据。
影像组(Photogroups)
为了获得最优精度和最佳性能,ContextCapture会将同一台相机在同一焦距和影像尺寸(同样的内方位元素)拍摄的影像定义为一个影像组。ContextCapture能够自动建立相关的影像组,如果按采集影像的相机来设置原始影像的目录结构,不同的相机(即使型号相同)拍摄的影像应放置到不同的独立的子目录下。相反,由同一台相机拍摄的影像应当都放置在同一子目录下。
译者注:直接导入照片一般不会出问题,但是通过Excel编辑的工程文件,一定要注意好照片的分组,否则很容易导致空三失败还查不出来原因。尤其五镜头相机,正摄和倾斜的镜头经常焦距不一致。
遮罩(Masks)
遮罩是指在图像处理过程中用于某原始影像匹配制作的单色图像将图像指定部分(如遮挡物、反射) 进行忽略运算的方法。有效的遮罩文件是黑白单色且与原始影像匹配的尺寸的TIFF格式图片。被遮罩的黑色部分遮挡的图像像素在空中三角测量和重建过程中将被忽略处理。
遮罩的文件名必须与原始影像的文件名对应:
- 对一个原始影像文件名为“filename.ext”进行掩膜处理,遮罩文件名必须命名为 “filename_mask.tif”,并且需要将其与原始影像放置到同一目录下。 例如,图像名为“IMG0002564.jpg”对应的遮罩文件为“IMG0002564_mask.tif”
- 如果对于目录下所有的同样大小尺寸的原始影像进行遮罩处理,只需将遮罩文件放置到该目录 下,且命名为“mask.tif”
译者注:此方法经常鉴于上扬拍照时螺旋桨的影响,以及小物件建模的单反拍摄。此类问题尽可能的在拍照环节避免。
2.2导入影像文件格式(Input data file formats)
ContextCapture能直接支持JPEG与TIFF格式的图像,也能读取一些常见的RAW格式。ContextCapture也能直接读取影像文件自带的Exif元数据。
支持的文件格式有:
- JPEG
- Tag Image File Format (TIFF)
- 松下Panasonic RAW (RW2)
- 佳能Canon RAW (CRW, CR2)
- 尼康Nikon RAW (NEF)
- 索尼Sony RAW (ARW)
- 哈苏Hasselblad (3FR)
- Adobe Digital Negative (DNG)
- JPEG 2000
- ECW
- PNG
ContextCapture也支持导入下面的视频帧:
- Audio Video Interleave (AVI)
- MPEG-1/MPEG-2 (MPG)
- MPEG-4 (MP4)
- Windows Media Video (WMV)
- Quicktime (MOV)
点云文件格式:
ContextCapture支持两种常见的可以存储扫描位置的点云格式
- ASTM E57 file format (.e57)
- Cyclone point cloud export format (.ptx)
2.3位置数据(Positioning data)
ContextCapture的一大突破性功能是能够处理那些完全不带有定位数据的影像。因此, ContextCapture可以支持从任意位置、旋转与比例的原始影像数据来生成三维模型,并通常 能还原它的正确姿态方向。同时,ContextCapture也原生支持两种类型的定位数据:GPS标签 (GPS tags)和控制点(Control Points)。 如果在原始影像的Exif元数据中包含GPS标签,ContextCapture会自动读取并用它来作为生成三维模型的坐标依据。
注:不完整的GPS标签将会被忽略(如只具有经度与纬度坐标,但不具有高程)。
如果需要优于GPS坐标精确度,或者需要控制和消除由于数字积累误差造成的远距离几何失真时,就建议引入控制点。建立地理参照系必须至少三个控制点,更多数量且分布均匀的控制点可以消除远距离几何失真。控制点的精确三维坐标可通过传统测量方法获得。用户可通过ContextCapture主控台的控制点模块或其他第三方工具在原始影像(最少两张,建议三张以上)中标出该控制点位置的方式来输入控制点。
译者注:刺控制点建议空三成功后刺点,可以降低很多工作量。另外每个点最好是各个角度的照片都包含两张以上。
除了GPS标签与控制点,ContextCapture还能通过专用的XML格式导入几乎任何定位信息(如惯性导航系统的数据)或第三方软件的空中三角测量的结果。导入后,ContextCapture可以使用这些数据,或者对它们进行自动微调,从而节约了大量的空三运算的时间。这一功能令ContextCapture有了更高的可扩展性和兼容性。
译者注:实测发现对photoscan的空三成果可以无缝导入,可以有效解决小物件建模后,体积大无法生成合适的osgb格式文件的问题。而pix4d暂时没有找到导出xml格式空三的方式。
3.ContextCapture介绍
3.1原理综述(Principle)
ContextCapture需要以一组对静态建模主体从不同的角度拍摄的数码照片作为输入数据源, 加入各种可选的额外辅助数据:摄像头的属性(焦距,传感器尺寸,主点,镜头失真),照片的位置(如GPS),旋转照片(例如,INS),控制点,等等... 无需人工干预,ContextCapture在几分钟/或数小时的计算时间内,根据输入的数据的大小,能输出高分辨率的带有真实纹理的三角网格模型。 生成输出的三维网格模型能够准确精细地表现出建模主体的真实色泽、几何形态及细节构成。
适合建模的物体


ContextCapture的高兼容性,能对各种对象各种数据源进行精确无缝建模,从厘米级到公里级,从地面或从空中拍摄。只要输入照片的分辨率和精度足够,生成的三维模型是可以实现无限精细的细节。
ContextCapture最适合于的复杂几何形态及哑光图案表面的物体,包括但不限于艺术品,服 装,人脸,家具,建筑物,地形和植被等。
没有颜色变化的(如纯色墙壁/地板/天花板),或反射、高光泽,透明或折射材料(如玻璃,金属, 塑料,水,以及某些皮肤皮革等)的表面可能会造成生成的3D模型表面存在错误的孔、凹凸或噪音。
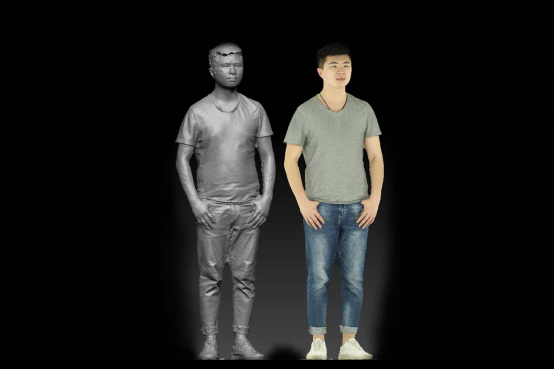
ContextCapture主要应用对象为相对静态的物体。移动物体(人,车辆,动物等),不作为主要建模对象时,偶尔会处理出现在生成的3D模型中。如果要针对这些对象单体进行数据制作,在拍摄过程中,人或动物等对象应保持静止或采用多个同步像机来拍摄。
译者注:当前流行的人像拍照就是采用矩阵相机,多相机同时曝光。如下图效果。

3.1.1近至中距离景物建模(Capturing close range - mid range subjects)
应用领域覆盖:建筑设计,工程与施工,制造业,娱乐及传媒,电商,科学分析,文物保护,文化遗产等领域。


3.1.2城市大场景及自然景观Mapping large-scale urban or natural environments
ContextCapture超越了由一些流行的在线地图服务提供的低空鸟瞰图。它可以以完全自动化的方式,将各种图像源(飞机、直升机、无人机、街道级)转换为一致、准确的真实3D模型,涵盖所有尺度,从大规模的浮雕到更精细的人造建筑、物体和自然地标等。
大场景主要应用领域:数字城市,城市规划,交通管理,数字公安,消防救护,应急安防,防震减灾,国土资 源,地质勘探,矿产冶金等。




3.2ContextCapture系统架构(Architecture)
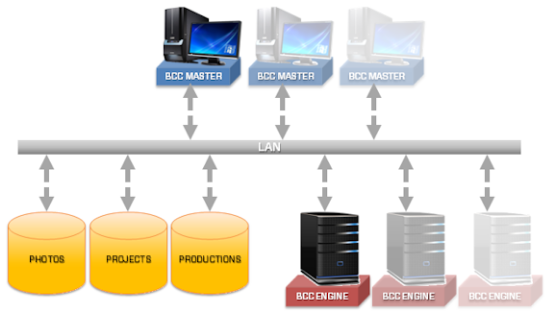
ContextCapture的两大模块是Master与Engine引擎端。它们都遵循主从模式(Master-Worker):
Master是ContextCapture的主要模块。您可以通过图形用户界面,向软件定义输入数据,设置处理过程、 提交过程任务、监控这些任务的处理过程与处理结果可视化等。 ContextCapture Master不会执行处理过程,而是将任务分解为基础作业并其提交给作业队列(Job Queue)
Engine是ContextCapture的工作模块。它在计算机后台运行,无需与用户交互。当ContextCapture引擎端空闲时,一个等待队列中的作业的执行, 主要取决于它的优先级与提交的数据。一个作业通常由空中三角测量过程或三维重建组成。空中三角测量过程或三维重建采用不同的且计算量大的密集型算法,如关键点的提取,自动连接点匹配,集束调整、密度图像匹配、鲁棒三维重建、无接缝纹理映射、纹理贴图集包装、细节层次生成等。
译者注:空三(AT)的任务优先级高于Production的生成
由于采用了主从模式(Master-Worker),ContextCapture支持集群(Grid Computing)。 只需在多台计算机上运行多个ContextCaptureEngine引擎端,并将它们关联到同一个作业队列上, 就会大幅降低处理时间。 ContextCapture的集群主要基于操作系统的本地文件共享机制。它允许ContextCapture透明地操作SAN(存储区域网络)、NAS(网络连接式存储)或者共享的标准HDD(硬盘驱动器),无需配备任何特殊的网格运算集群或架构。

ContextCapture包括以下工具模块:
Acute3D Viewer:是Acute3D的免费的轻量可视化模块,它对Acute3D原生格式进行了优化,这种格式可以处理多重精细度模型(LOD)、分页(Paging)和网络流(Streaming),因此TB级的三维数据能够在本地或在线环境下进行顺畅地浏览。您可以使用Viewer对观察控制ContextCapture主控台工作流的生产质量,您也可以利用它对最终生产的模型成果进行浏览。
ContextCapture Settings: 管理软件授权许可证及相关其他软件配置。
ContextCapture SceneComposer:为Viewer修改设定各种三维可视化工程文件。
译者注:Acute3D Viewer几乎支持ContextCapture所有的三维模型数据格式。局限性表现为当数据量大的时候,tile数过多,初始加载过程会很慢。SceneCompose可以对osgb格式的模型编写Acute3D Viewer支持的s3c索引文件。过程较为复杂,新版本当中被隐藏了,可以去安装目录下查找。动代码的建议使用开源的osgviewer,或者免费的locaspaceviewer对于浏览osgb格式的倾斜模型,操作简单,体验效果较好。
3.3工作流(Workflow)

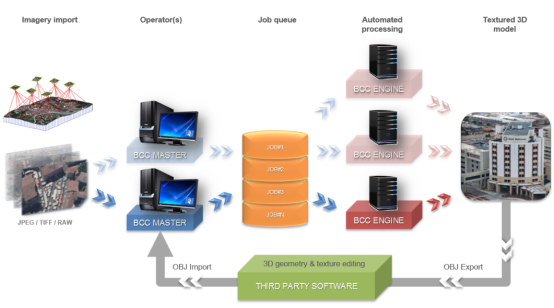
用户可以通过ContextCapture Master主控台用户界面,定义原始数据和处理过程设置,并向作业队列提交相应的三维重建任务。工作组中空闲的ContextCapture引擎会自动从作业队列中获取三维重建任务并并将结果输出至预先设定的存储路径。通过ContextCapture Master主控台用户 面,用户也可以直接监控这些任务的当前状态与处理进度(想要获取更多的信息请参照作业监控)。 当所有这些任务处理完成之后,该项目的三维模型就已经生产完成了。
模型修饰(Retouching)
在绝大多数情景下, 自动生成的三维模型可以直接使用。但是对于一些特定应用,用户可能需要使用某些第三方软件对自动生成的三维模型的局部几何模型误差进行修饰,并通过ContextCapture Master主控台 =将这些修饰后的三维模型重新导入,并提交新的三维重建任务使修改后的模型重新通过自动 =纹理映射获得正确的贴图以完成三维模型更新。
3.4系统要求(System Requirements)
ContextCapture支持运行在微软Windows XP/Vista/7/8/10 64位操作系统上。
它至少需要8G的内存和 拥有1GB显存与512个CUDA核心的NVIDIA GeForce 或 AMD显卡,或者Intel支持opengl3.2以上并且大于1G显存的显卡。
该软件对桌面计算机与机架式计算机均支持。该软件甚至可以在多媒体或游戏笔记本上运行,虽然 这时的性能会显著降低。
截至2017年7月,我们建议的运行配置为:主流塔式计算机运行微软Windows 7/8/10 64位专业版并带 有至少16GB的内存、至少8线程的CPU与NVIDIA GeForce GTX 1080Ti及以上的显卡。 请联系Acute3D当地代理商提供更专业的硬件配置建议(GeForce GTX TITAN, Quadro, bi-Xeon等)
输入数据、处理数据与输出数据最好被存储在快速存储装置上(如高速HDD、SSD、SAN等等), 而对于基于文件共享的集群运行环境,我们建议使用千兆或以上的以太网。
译者注:根据网友的实测,对于实际数据生产的公司建议64G以上内存,有条件的可以128Gb以上。CPU频率越高越好。显卡还是建议NVIDIA GTX2080及以上系列。对于原始照片、生成结果建议使用磁盘阵列或者固态硬盘。是在不具备条件的可以考虑照片、生成结果分磁盘存放。
3.4.1关于远程桌面(About Remote desktop connection)
ContextCapture Engine引擎不能通过Windows自带的远程桌面连接来操作,因为它不支持硬件加速。然而,用户可以利用基于VNC(虚拟网络计算机)的各种远程遥控软件来操作 ContextCapture Engine引擎端 。
译者注:很多网友遇到了这个问题,这里建议teamviewer、QQ、或者KVM物理切换器
3.4.2关于Windows会话(About Windows session)
当ContextCapture引擎运行时软件不支持切换Windows用户,这将会引起运行计算失败。 因为硬件加速在当用户未连接时不可用。
译者注:个别网友遇到了电脑查看显卡正常,ContextCapture无法识别显卡的问题,有驱动问题的,更多的是显示器插在了主板上。显示器一定要插在独立显卡上。
3.4.3 中文路径问题(About paths with non-ASCII characters)
ContextCapture目前版本还不支持非ASCII字符的路径。因此,所有指定的输入与输出文件的路径必须使用ASCII字符(即暂不支持中文文件名和目录名)。
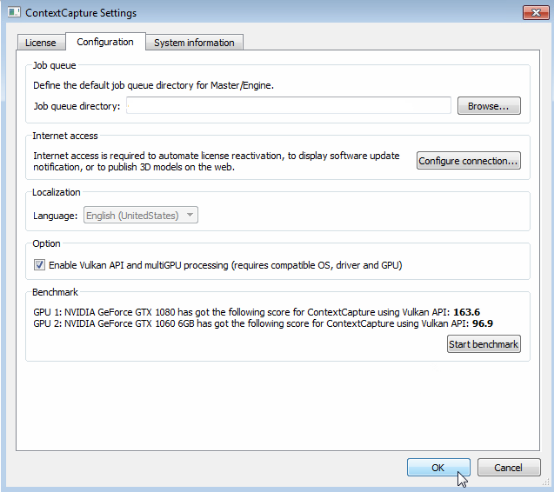
3.4.4多GPU模式(Multi GPU mode)
ContextCapture可以利用多个GPU架构。
检查ContextCapture设置中的“启用Vulkan API和MultiGPU处理”选项。默认情况下,此选项未选中。
此功能可以使用多个GPU,即使来GPU自不同的供应商(Nvidia、AMD,但不支持Intel)。虽然它有利于几个GPU,但也可以只有一个GPU。我们建议使用最新的显卡卡来启用此功能,特别是Nvidia Pascal一代(GTX 10xx)、AMD Polaris(RX 4xx)和最新的驱动程序。驱动程序会定期更新,因此我们不会发布兼容的GPU/Driver/OS组合列表。
截至2017年9月,ContextCapture要求GPU驱动程序至少支持Vulkan API 1.0.37版本。
此外,不要启用SLI(用于Nvidia GPU)或CrossFire(用于AMD GPU)。最后,此模式使用密集的GPU资源,在引擎运行时不要打开任何其他3D应用程序或Internet浏览器。
多GPU模式是最新推出的,可能不如单GPU模式稳定。如果您在3D制作中遇到问题(此选项勾选了未起作用),请尝试以下步骤:
1.为您的GPU安装最新的驱动程序。
2.重新启动计算机。
3.重新提交失败的作业。
如果它不能解决您的问题,请通知我们的技术支持,并在解决您的问题前使用单GPU模式。

多GPU模式下的性能说明:
•2 gpu:比1 gpu快15%
•3 gpu:比1 gpu快20%
•4 gpu:比1 gpu快24%
译者注:未使用过多GPU模式,从该指标看来,2GPU性价比可能更高一些。但上文提到的硬盘问题可能比这个能提速更多,从显卡价钱来看可以优先考虑硬盘问题。
高级选项(Advanced Option)
当您启用“vulkanapi和multippu处理”时,默认情况下,上下文捕获引擎将使用您的所有gpu进行处理。使用该选项,您可以通过命令行中ccengine的选项“-gpu”为vulkan选择GPU的一个子集。
请注意,ContextCapture始终使用OpenGL,因此它始终需要一个专门用于OpenGL的GPU。使用选项“-gpu”选择vulkan gpu不会更改将选择哪个gpu contextcapture进行OpenGL处理。
语法:ccengine--gpu k
如果我们以2的k次方来描述,那么这个基中的每个数字1对应于vulkan激活的GPU。例如,您有3个GPU,您希望使用第一个和第三个GPU进行vulkan处理,然后k=20+22=5。命令是:ccengine--gpu 5
其他例子:
ccengine--gpu 1:使用第一个gpu
ccengine--gpu 2:使用第二个gpu
ccengine--gpu 3:使用第一个和第二个gpu(因为:3=20+21)
如果没有指定“-gpu”选项,那么程序将使用vulkan处理的所有gpu作为默认值。
3.4.5性能(Performance)
ContextCapture开发了基于图像处理单元的通用计算(GPGPU)能力,使得在这些操作(图像插值、光栅化与Z缓存)上处理速度快50倍。它也利用多核超线程计算来对算法的CPU密集部分进行加速。
一个ContextCapture Engine引擎端平均一天可以处理10-20千兆(gigapixels)像素的输入数据以产生具有额外精度的纹理3D网格,这取决于硬件配置。对于输入的点云数据,一个ContextCapture Engine引擎端每天可以处理大约2.5亿个点。
使用集群可以显著减少网格计算的处理时间。
举个例子:空中5角度拍摄的地面10~15厘米分辨率的倾斜原片, 4个 ContextCapture Engine组成的引擎集群平均生产速度30—50平方公里每天。
3.4.6软件版本(Software Editions )
ContextCapture软件系列的两个版本分别是ContextCapture Basic和ContextCapture Center。
ContextCapture自动重建对象、建筑物、人造或自然地标,可以处理高达300千兆像素的图像数据集,或高达5亿点的点云,具备通过作业队列的批处理能力。最适合但不限于无人机/无人机/无人机操作员,该版本允许制作高分辨率3D模型,以及生成数字表面模型(DSM)和真实正射影像。
ContextCapture Center致力于大比例尺的三维测绘。它可以处理无限数量的照片而不受尺寸限制,并且允许在一组三维重建引擎上并行计算。它可以导入复杂的定位数据(例如,惯性导航系统数据)、第三方航空三角测量结果和表面约束。因此,它可以适应大规模的3D内容制作,就像整个3D城市级别的数据处理。
版本对比表
|
Features |
ContextCapture |
ContextCapture Center |
|
Input imagery datasets 影像数据量 |
≤ 300 gigapixels |
Unlimited 无限 |
|
Input point cloud datasets 点云数据量 |
≤ 500 million points |
Unlimited 无限 |
|
Automatic aerial triangulation / calibration 自动空三 |
|
支持 |
|
Automatic true 3D reconstruction (3D TIN) 3D重建 |
|
支持 |
|
Georeferencing 地理参考 |
|
支持 |
|
True orthophoto / DSM generation (GeoTIFF, JPG...) 影像、地形生成 |
|
支持 |
|
Dense point cloud generation (LAS, POD, LAZ) 点云生成 |
|
支持 |
|
CAD interoperability (OBJ, FBX, Collada, STL, DGN...) CAD互操作性 |
|
支持 |
|
3D GIS interoperability (Agency9 CityPlanner, Eternix Blaze Terra, Google Earth, Skyline TerraBuilder, SpacEyes3D Builder, Supermap GIS, DIGINEXT VirtualGEO...) 三维GIS互操作性 |
|
支持 |
|
Free Viewer / web publishing 免费浏览发布 |
支持 |
支持 |
|
Unlimited tiling 无限分块 |
支持 |
|
|
Task queuing / background processing 任务队列、后台处理 |
支持 |
支持 |
|
SDK / Python scripting SDK调用,python脚本支持 |
否 |
支持 |
|
Ultra large project management / Grid computing 超大项目管理/网格计算 |
否 |
支持 |
|
Reconstruction constraints (water surfaces…) 重建约束 |
|
支持 |
|
Quality control 质量控制 |
|
|










警告:ContextCapture版本之间的项目文件兼容性受到限制。低版本无法打开更高版本创建的项目文件。
3.4.8互操作性(Interoperability)
ContextCapture通过专用格式或通用格式与二维/三维GIS软件以及CAD解决方案完全互操作。
ContextCapture还可以以各种交换格式导出准确的相机属性、位置和方向。
另请参见导出块和输出格式。
CAD/3D软件交换(CAD/3D Software)
支持标准Wavefront OBJ、collada dae和FBX格式的导出,ContextCapture生成的3D模型可以导出到绝大多数CAD和3DGIS软件,包括Bentleymrostation、Autodesk 3DS Max、Autodesk AutoCAD、Rhinoceros 3d、Autodesk玛雅、Autodesk Mudbox、Autodesk MeshMixer、Meshlab。
ContextCapture可以生成具有多个详细级别(LOD)的3D网格,以便于将数据集成到支持lod显示优化的3维GIS软件中。
对于非常大的三维模型(如城市),即使使用LOD技术,Tb级的大数据流畅展示也有难度。在这种情况下,可以使用3mx格式将模型导出到Bentley MicroStation。
译者注:开源的osg框架对于osgb格式的lod数据展示效果很不错,另外LSV在加载TB级的倾斜模型数据上独有优势,同时绿色,免费。对于web展示可以考虑Wish3D平台,该平台支持根节点合并。
二维、三维GIS软件(2D/3D GIS software)
地理参考三维模型支持任何坐标系统(ContextCapture包括4000多个空间参考系统,可以使用用户定义的系统进行扩展)和自定义GIS应用程序的瓦片分割方式。
ContextCapture可以生成带LOD的3D网格模型,可与几种领先的3D GIS软件相兼容:TerraExplorer(Skyline)、SpaceYes3D Builder、CityPlanner(Agency9)、VirtualGeo(Diginest)、Blaze Terra(Etherix)、Supermap GIS、Google Earth、Cesium等。
译者注:这里还是要补上LSV、wish3D平台,该平台专门针对Smart3D生成的带lod的osgb数据格式进行了显示优化。
ContextCapture可以生成真正的正射影像和DSM,兼容的所有标准地理信息系统工具。
ContextCapture可以将密集点云导出为ASPRS Laser(LAS)和Pointoolspod格式,每个点上都有颜色信息,可用于大多数点云分析和分类软件。
3.4.9三维可视化(3D Visualization)
ContextCapture内置Acute3DViewer,这是一个在Windows下本地或联机工作的免费可下载的轻量级3dVisualization应用程序。
三维可视化
Acute3D Viewer针对ContextCapture的3mx格式进行了优化,它可以处理细节级别、分页和流式传输,从而以平滑的帧速率显示万亿字节的3D数据。
Acute3D查看器集成了3D测量工具(可配置空间参考系统中的3dPosition、3D距离和高度差、表面和体积计算)和瓦片选择工具。
您可以将Acute3D查看器与ContextCapture Master结合使用,以控制整个工作流中的生产质量。您还可以使用它生成飞行动画。
Acute3d Viewer可在http://www.bentley.com上免费下载,为ContextCapture 3MX和S3C格式发布3D模型提供了即时解决方案。
3.4.10网络发布(Web publishing)
ContextCapture用户有多种形式可以在Internet上发布其原始3D内容。
使用Acute3D Web Viewer发布3mx产品
使用我们的免费Acute3dWebViewer,3mx产品可以在任何网站上在线可视化。我们的Web Viewer是一个跨平台的WebGL3dViewer,适用于台式机、平板电脑和智能手机,可轻松嵌入任何网页。它可以在任何支持WebGL的浏览器中工作,而不需要使用插件。只需将您的3mx产品上传到您的Web服务器(或在线文件存储Web服务/内容交付网络,如azureblob/cdn或amazon s3/cloudfront),即可在您的网站上发布或嵌入您的3D模型。
发布到Cesiumor ContextCapture Web Viewer 2.0
ContextCapture可以生成Cesium 3Dtile格式的3D模型,适用于在Cesium或ContextCapture Web Viewer 2.0中的显示。Cesium是一个开放源代码的JavaScript库,用于3D地图显示。关于Cesium的更多信息。
了解如何将三维模型发布到CesiumWeb应用程序。
ContextCapture Web Viewer 2.0是一款基于Cesium的定制Web应用程序,具有定制的用户界面和适合真实数据显示的功能。
了解如何将3DModels发布到ContextCapture Web Viewer 2.0应用程序。
在线分享您的S3C产品
ContextCapture用户可以在标准Web服务器上托管S3C格式的3D模型,以便使用我们的免费Acute3D查看器(Windows和Mac OSX的桌面应用程序)进行远程可视化。
只需将您的S3C产品上传到您的Web服务器(或上传到在线文件存储Web服务/内容交付网络,如azureblob/cdn或Amazon S3/CloudFront),并在ContextCapture S3C Composer中设置访问参数,使您的模型可以在Acute3dViewer中在线查看。
了解如何在Web上发布您的S3C内容。
发布到SketchFab
SketchFab是一个集发布、共享和嵌入3DModels的平台,您可以在SketchFab.com上免费注册。ContextCapture允许直接将生成的三维模型发布到SketchFab。
了解如何将内容发布到SketchFab
译者注:如果生成的模型是osgb格式的,可以到wish3d平台发布,一个国产,并自带合并根节点功能的,集全景、图片、文字标注于一体的倾斜模型web发布平台,支持影像、地形、矢量的数据总和展示。www.wish3d.com